- Systèmes méquations linéaires avec n inconnu.
Résoudre un système d'équations linéaires- c'est un tel ensemble de nombres ( x 1 , x 2 , …, x n), lorsqu'elle est substituée dans chacune des équations du système, l'égalité correcte est obtenue.
Où une ij , je = 1, …, m; j = 1, …, n— les coefficients du système ;
b je , je = 1, …, m- les membres gratuits ;
x j , j = 1, …, n- inconnu.
Le système ci-dessus peut s’écrire sous forme matricielle : UNE X = B,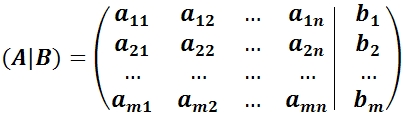
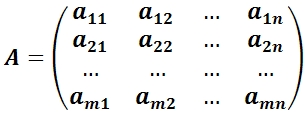
Où ( UN|B) est la matrice principale du système ;
UN— matrice du système étendu ;
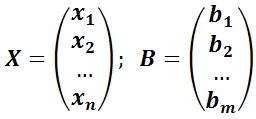
X— colonne d'inconnues ;
B— colonne de membres gratuits.
Si matrice B n'est pas une matrice nulle ∅, alors ce système d'équations linéaires est dit inhomogène.
Si matrice B= ∅, alors ce système d'équations linéaires est dit homogène. Un système homogène a toujours une solution nulle (triviale) : x 1 = x 2 = …, x n = 0.
Système conjoint d'équations linéaires est un système d'équations linéaires qui a une solution.
Système incohérent d'équations linéaires est un système insoluble d’équations linéaires.
Un certain système d'équations linéaires est un système d'équations linéaires qui a une solution unique.
Système indéfini d'équations linéaires est un système d'équations linéaires avec un nombre infini de solutions. - Systèmes de n équations linéaires à n inconnues
Si le nombre d'inconnues est égal au nombre d'équations, alors la matrice est carrée. Le déterminant d'une matrice est appelé déterminant principal d'un système d'équations linéaires et est désigné par le symbole Δ.
Méthode Cramer pour résoudre des systèmes néquations linéaires avec n inconnu.
La règle de Cramer.
Si le déterminant principal d'un système d'équations linéaires n'est pas égal à zéro, alors le système est cohérent et défini, et la seule solution est calculée à l'aide des formules de Cramer :
où Δ i sont des déterminants obtenus à partir du déterminant principal du système Δ en remplaçant jeème colonne à la colonne des membres libres. . - Systèmes de m équations linéaires à n inconnues
Théorème de Kronecker-Capelli.
Pour qu'un système donné d'équations linéaires soit cohérent, il faut et suffisant que le rang de la matrice système soit égal au rang de la matrice étendue du système, rang(Α) = rang(Α|B).
Si rang(Α) ≠ rang(Α|B), alors le système n'a évidemment pas de solutions.
Si rang(Α) = rang(Α|B), alors deux cas sont possibles :
1) rang(Α) = n(nombre d'inconnues) - la solution est unique et peut être obtenue à l'aide des formules de Cramer ;
2) rang(Α)< n - il existe une infinité de solutions. - Méthode Gauss pour résoudre des systèmes d'équations linéaires
Créons une matrice étendue ( UN|B) d'un système donné à partir des coefficients des inconnues et des membres droits.
La méthode gaussienne ou méthode d'élimination des inconnues consiste à réduire la matrice étendue ( UN|B) en utilisant des transformations élémentaires sur ses lignes vers une forme diagonale (vers la forme triangulaire supérieure). En revenant au système d'équations, toutes les inconnues sont déterminées.
Les transformations élémentaires sur les chaînes sont les suivantes :
1) échangez deux lignes ;
2) multiplier une chaîne par un nombre autre que 0 ;
3) ajouter une autre chaîne à une chaîne, multipliée par un nombre arbitraire ;
4) jeter une ligne zéro.
Une matrice étendue réduite à la forme diagonale correspond à un système linéaire équivalent à celui donné, dont la solution ne pose pas de difficultés. . - Système d'équations linéaires homogènes.
Un système homogène a la forme :
cela correspond à l'équation matricielle Un X = 0.
1) Un système homogène est toujours cohérent, puisque r(UNE) = r(UNE|B), il existe toujours une solution nulle (0, 0, …, 0).
2) Pour qu'un système homogène ait une solution non nulle, il faut et suffisant que r = r(UNE)< n , ce qui équivaut à Δ = 0.
3) Si r< n , alors évidemment Δ = 0, alors des inconnues libres apparaissent c 1 , c 2 , …, c n-r, le système a des solutions non triviales, et il en existe une infinité.
4) Solution générale Xà r< n peut s’écrire sous forme matricielle comme suit :
X = c 1 X 1 + c 2 X 2 + … + c n-r X n-r,
où sont les solutions X 1, X 2, …, Xn-r former un système fondamental de solutions.
5) Le système fondamental de solutions peut être obtenu à partir de la solution générale d'un système homogène : ,
,
si nous définissons séquentiellement les valeurs des paramètres égales à (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Extension de la solution générale en termes de système fondamental de solutions est un enregistrement d'une solution générale sous la forme d'une combinaison linéaire de solutions appartenant au système fondamental.
Théorème. Pour qu'un système d'équations linéaires homogènes ait une solution non nulle, il faut et suffisant que Δ ≠ 0.
Ainsi, si le déterminant Δ ≠ 0, alors le système a une solution unique.
Si Δ ≠ 0, alors le système d'équations linéaires homogènes a un nombre infini de solutions.
Théorème. Pour qu’un système homogène ait une solution non nulle, il faut et il suffit que r(UNE)< n .
Preuve:
1) r il ne peut pas y en avoir plus n(le rang de la matrice ne dépasse pas le nombre de colonnes ou de lignes) ;
2) r< n , parce que Si r = n, alors le déterminant principal du système Δ ≠ 0, et, d’après les formules de Cramer, il existe une unique solution triviale x 1 = x 2 = … = x n = 0, ce qui contredit la condition. Moyens, r(UNE)< n .
Conséquence. Pour avoir un système homogène néquations linéaires avec n les inconnues avaient une solution non nulle, il faut et suffisant que Δ = 0.
Solution. UNE =  . Trouvons r(A). Parce que matrice Et a l'ordre 3x4, alors l'ordre le plus élevé des mineurs est 3. De plus, tous les mineurs du troisième ordre sont égaux à zéro (vérifiez-le vous-même). Moyens, r(UNE)< 3. Возьмем главный mineur de base = -5-4 = -9 ≠
0. Donc r(A) =2.
. Trouvons r(A). Parce que matrice Et a l'ordre 3x4, alors l'ordre le plus élevé des mineurs est 3. De plus, tous les mineurs du troisième ordre sont égaux à zéro (vérifiez-le vous-même). Moyens, r(UNE)< 3. Возьмем главный mineur de base = -5-4 = -9 ≠
0. Donc r(A) =2.
Considérons matrice AVEC =  .
.
Tierce mineure commande ≠ 0. Donc r(C) = 3.
Puisque r(A) ≠ r(C) , alors le système est incohérent.
Exemple 2. Déterminer la compatibilité d'un système d'équations 
Résolvez ce système s’il s’avère cohérent.
Solution.
UNE = , C =  . Il est évident que r(A) ≤ 3, r(C) ≤ 4. Puisque detC = 0, alors r(C)< 4. Considérons mineure troisième commande, situé dans le coin supérieur gauche de la matrice A et C : = -23 ≠
0. Donc r(A) = r(C) = 3.
. Il est évident que r(A) ≤ 3, r(C) ≤ 4. Puisque detC = 0, alors r(C)< 4. Considérons mineure troisième commande, situé dans le coin supérieur gauche de la matrice A et C : = -23 ≠
0. Donc r(A) = r(C) = 3.
Nombre inconnu dans le système n=3. Cela signifie que le système a une solution unique. Dans ce cas, la quatrième équation représente la somme des trois premières et peut être ignorée.
D'après les formules de Cramer nous obtenons x 1 = -98/23, x 2 = -47/23, x 3 = -123/23.
2.4. Méthode matricielle. Méthode gaussienne
système néquations linéaires Avec n les inconnues peuvent être résolues méthode matricielle selon la formule X = A -1 B (à Δ ≠ 0), qui est obtenu à partir de (2) en multipliant les deux parties par A -1.
Exemple 1. Résoudre un système d'équations 
méthode matricielle (dans la section 2.2, ce système a été résolu en utilisant les formules de Cramer)
Solution. Δ = 10 ≠ 0 A = - matrice non dégénérée.
=  (vérifiez-le vous-même en effectuant les calculs nécessaires).
(vérifiez-le vous-même en effectuant les calculs nécessaires).
A -1 = (1/Δ)х=  .
.
X = A -1 V = x= .
Répondre: .
D'un point de vue pratique méthode matricielle et formules Kramer sont associés à une grande quantité de calculs, la préférence est donc donnée Méthode gaussienne, qui consiste en l'élimination séquentielle des inconnues. Pour ce faire, le système d'équations est réduit à un système équivalent avec une matrice triangulaire étendue (tous les éléments situés en dessous de la diagonale principale sont égaux à zéro). Ces actions sont appelées mouvement vers l’avant. A partir du système triangulaire résultant, les variables sont trouvées par substitutions successives (inverse).
Exemple 2. Résoudre le système en utilisant la méthode de Gauss
(Ci-dessus, ce système a été résolu en utilisant la formule de Cramer et la méthode matricielle).
Solution.
Déménagement direct. Écrivons la matrice étendue et, à l'aide de transformations élémentaires, réduisons-la à une forme triangulaire :
 ~
~  ~
~  ~
~  ~
~  .
.
On a système 
Mouvement inversé. De la dernière équation on trouve X 3 = -6 et remplacez cette valeur dans la deuxième équation :
X 2 = - 11/2 - 1/4X 3 = - 11/2 - 1/4(-6) = - 11/2 + 3/2 = -8/2 = -4.
X 1 = 2 -X 2 + X 3 = 2+4-6 = 0.
Répondre: .
2.5. Solution générale d'un système d'équations linéaires
Soit un système d'équations linéaires = b je(je=). Soit r(A) = r(C) = r, c'est-à-dire le système est collaboratif. Tout mineur d'ordre r autre que zéro est mineure de base. Sans perte de généralité, nous supposerons que la base mineure est située dans les r (1 ≤ r ≤ min(m,n)) lignes et colonnes de la matrice A. Après avoir écarté les m-r dernières équations du système, nous écrivons un système raccourci :

ce qui est équivalent à celui d'origine. Nommons les inconnues x 1 ,….xr de base, et x r +1 ,…, x r libre et déplacez les termes contenant des inconnues libres vers la droite des équations du système tronqué. On obtient un système par rapport aux inconnues de base :

qui pour chaque ensemble de valeurs d'inconnues libres x r +1 = С 1 ,…, x n = С n-r n'a qu'une seule solution x 1 (C 1 ,…, C n-r),…, x r (C 1 ,…, C n-r), trouvé par la règle de Cramer.
Solution correspondante le raccourci, et donc le système original a la forme :
X(C 1 ,…, Cn-r) =  -
solution générale du système.
-
solution générale du système.
Si dans la solution générale nous attribuons des valeurs numériques aux inconnues libres, nous obtenons une solution du système linéaire, appelée solution partielle.
Exemple. Établir la compatibilité et trouver une solution générale du système

Solution. UNE =  , C =
, C =  .
.
Donc Comment r(UNE)= r(C) = 2 (voyez ceci par vous-même), alors le système d'origine est cohérent et a un nombre infini de solutions (puisque r< 4).
Analysons deux types de solutions aux systèmes d'équations :
1. Résoudre le système en utilisant la méthode de substitution.
2. Résoudre le système par addition (soustraction) terme par terme des équations du système.
Pour résoudre le système d'équations par méthode de substitution vous devez suivre un algorithme simple :
1. Exprimez. À partir de n'importe quelle équation, nous exprimons une variable.
2. Remplacer. Nous substituons la valeur résultante dans une autre équation au lieu de la variable exprimée.
3. Résolvez l'équation résultante avec une variable. Nous trouvons une solution au système.
Résoudre système par méthode d'addition (soustraction) terme par terme besoin de:
1. Sélectionnez une variable pour laquelle nous ferons des coefficients identiques.
2. Nous ajoutons ou soustrayons des équations, ce qui donne une équation à une variable.
3. Résolvez l’équation linéaire résultante. Nous trouvons une solution au système.
La solution du système réside dans les points d’intersection des graphiques de fonctions.
Examinons en détail la solution des systèmes à l'aide d'exemples.
Exemple 1:
Résolvons par méthode de substitution
Résoudre un système d'équations par la méthode de substitution2x+5y=1 (1 équation)
x-10y=3 (2ème équation)
1. Exprimer
On peut voir que dans la deuxième équation il y a une variable x avec un coefficient de 1, ce qui signifie qu'il est plus simple d'exprimer la variable x à partir de la deuxième équation.
x=3+10a
2.Après l'avoir exprimé, nous substituons 3+10y dans la première équation au lieu de la variable x.
2(3+10 ans)+5 ans=1
3. Résolvez l'équation résultante avec une variable.
2(3+10y)+5y=1 (ouvrez les parenthèses)
6+20 ans+5 ans=1
25 ans = 1-6
25 ans = -5 | : (25)
y=-5:25
y=-0,2
La solution du système d'équations sont les points d'intersection des graphiques, nous devons donc trouver x et y, car le point d'intersection est constitué de x et y. Trouvons x, au premier point où nous l'avons exprimé, nous substituons y.
x=3+10a
x=3+10*(-0,2)=1
Il est d'usage d'écrire des points en premier lieu on écrit la variable x, et en second lieu la variable y.
Réponse : (1 ; -0,2)
Exemple n°2 :
Résolvons en utilisant la méthode d'addition (soustraction) terme par terme.
Résoudre un système d'équations par la méthode d'addition3x-2y=1 (1 équation)
2x-3y=-10 (2ème équation)
1. Nous choisissons une variable, disons que nous choisissons x. Dans la première équation, la variable x a un coefficient de 3, dans la seconde - 2. Nous devons rendre les coefficients identiques, pour cela nous avons le droit de multiplier les équations ou de diviser par n'importe quel nombre. On multiplie la première équation par 2 et la seconde par 3 et obtenons un coefficient total de 6.
3x-2a=1 |*2
6x-4a=2
2x-3a=-10 |*3
6x-9a=-30
2. Soustrayez la seconde de la première équation pour éliminer la variable X. Résolvez l'équation linéaire.
__6x-4a=2
5 ans = 32 | :5
y=6,4
3. Trouvez x. Nous substituons le y trouvé dans n’importe laquelle des équations, disons dans la première équation.
3x-2a=1
3x-2*6,4=1
3x-12,8=1
3x=1+12,8
3x=13,8 |:3
x=4,6
Le point d'intersection sera x=4,6 ; y=6,4
Réponse : (4.6 ; 6.4)
Vous souhaitez préparer vos examens gratuitement ? Tuteur en ligne gratuitement. Sans blague.
La résolution de systèmes d'équations algébriques linéaires (SLAE) est sans aucun doute le sujet le plus important d'un cours d'algèbre linéaire. Un grand nombre de problèmes dans toutes les branches des mathématiques se résument à la résolution de systèmes d'équations linéaires. Ces facteurs expliquent la raison de cet article. Le matériel de l'article est sélectionné et structuré de manière à ce qu'avec son aide vous puissiez
- choisissez la méthode optimale pour résoudre votre système d'équations algébriques linéaires,
- étudier la théorie de la méthode choisie,
- résolvez votre système d'équations linéaires en considérant des solutions détaillées à des exemples et des problèmes typiques.
Brève description du matériel de l'article.
Tout d’abord, nous donnons toutes les définitions et concepts nécessaires et introduisons les notations.
Ensuite, nous considérerons des méthodes de résolution de systèmes d'équations algébriques linéaires dans lesquelles le nombre d'équations est égal au nombre de variables inconnues et qui ont une solution unique. Premièrement, nous nous concentrerons sur la méthode de Cramer, deuxièmement, nous montrerons la méthode matricielle pour résoudre de tels systèmes d'équations, et troisièmement, nous analyserons la méthode de Gauss (la méthode d'élimination séquentielle de variables inconnues). Pour consolider la théorie, nous allons certainement résoudre plusieurs SLAE de différentes manières.
Après cela, nous passerons à la résolution de systèmes d'équations algébriques linéaires de forme générale, dans lesquels le nombre d'équations ne coïncide pas avec le nombre de variables inconnues ou la matrice principale du système est singulière. Formulons le théorème de Kronecker-Capelli, qui permet d'établir la compatibilité des SLAE. Analysons la solution des systèmes (s'ils sont compatibles) en utilisant la notion de base mineure d'une matrice. Nous considérerons également la méthode de Gauss et décrirons en détail les solutions aux exemples.
Nous nous attarderons certainement sur la structure de la solution générale des systèmes homogènes et inhomogènes d'équations algébriques linéaires. Donnons le concept de système fondamental de solutions et montrons comment la solution générale d'un SLAE s'écrit en utilisant les vecteurs du système fondamental de solutions. Pour une meilleure compréhension, regardons quelques exemples.
En conclusion, nous examinerons les systèmes d'équations qui peuvent être réduits à des systèmes linéaires, ainsi que divers problèmes dans la solution desquels se posent les SLAE.
Navigation dans les pages.
Définitions, concepts, désignations.
Nous considérerons des systèmes de p équations algébriques linéaires à n variables inconnues (p peut être égal à n) de la forme
Variables inconnues, - coefficients (certains nombres réels ou complexes), - termes libres (également nombres réels ou complexes).
Cette forme d'enregistrement SLAE est appelée coordonner.
DANS forme matricielle l'écriture de ce système d'équations a la forme,
Où  - la matrice principale du système, - une matrice colonnes de variables inconnues, - une matrice colonnes de termes libres.
- la matrice principale du système, - une matrice colonnes de variables inconnues, - une matrice colonnes de termes libres.
Si nous ajoutons une colonne-matrice de termes libres à la matrice A comme (n+1)ième colonne, nous obtenons ce qu'on appelle matrice étendue systèmes d'équations linéaires. Généralement, une matrice étendue est désignée par la lettre T et la colonne de termes libres est séparée par une ligne verticale des colonnes restantes, c'est-à-dire 
Résolution d'un système d'équations algébriques linéaires appelé un ensemble de valeurs de variables inconnues qui transforme toutes les équations du système en identités. L'équation matricielle pour des valeurs données de variables inconnues devient également une identité.
Si un système d’équations a au moins une solution, alors on l’appelle articulation.
Si un système d’équations n’a pas de solutions, alors on l’appelle non conjoint.
Si un SLAE a une solution unique, alors on l'appelle certain; s'il y a plus d'une solution, alors – incertain.
Si les termes libres de toutes les équations du système sont égaux à zéro ![]() , alors le système s'appelle homogène, sinon - hétérogène.
, alors le système s'appelle homogène, sinon - hétérogène.
Résolution de systèmes élémentaires d'équations algébriques linéaires.
Si le nombre d'équations d'un système est égal au nombre de variables inconnues et que le déterminant de sa matrice principale n'est pas égal à zéro, alors ces SLAE seront appelés élémentaire. De tels systèmes d'équations ont une solution unique et dans le cas d'un système homogène, toutes les variables inconnues sont égales à zéro.
Nous avons commencé à étudier ces SLAE au lycée. Lors de leur résolution, nous avons pris une équation, exprimé une variable inconnue en termes d'autres et l'avons substituée dans les équations restantes, puis pris l'équation suivante, exprimé la variable inconnue suivante et l'avons substituée dans d'autres équations, et ainsi de suite. Ou bien ils ont utilisé la méthode d’addition, c’est-à-dire qu’ils ont ajouté deux ou plusieurs équations pour éliminer certaines variables inconnues. Nous ne nous attarderons pas sur ces méthodes en détail, puisqu'il s'agit essentiellement de modifications de la méthode de Gauss.
Les principales méthodes de résolution de systèmes élémentaires d'équations linéaires sont la méthode de Cramer, la méthode matricielle et la méthode de Gauss. Trions-les.
Résolution de systèmes d'équations linéaires à l'aide de la méthode de Cramer.
Supposons que nous devions résoudre un système d'équations algébriques linéaires 
dans laquelle le nombre d'équations est égal au nombre de variables inconnues et le déterminant de la matrice principale du système est différent de zéro, c'est-à-dire .
Soit le déterminant de la matrice principale du système, et ![]() - les déterminants des matrices obtenues à partir de A par remplacement 1er, 2e, …, nième colonne respectivement à la colonne des membres libres :
- les déterminants des matrices obtenues à partir de A par remplacement 1er, 2e, …, nième colonne respectivement à la colonne des membres libres : 
Avec cette notation, les variables inconnues sont calculées en utilisant les formules de la méthode de Cramer comme  . C'est ainsi que l'on trouve la solution d'un système d'équations algébriques linéaires à l'aide de la méthode de Cramer.
. C'est ainsi que l'on trouve la solution d'un système d'équations algébriques linéaires à l'aide de la méthode de Cramer.
Exemple.
La méthode de Cramer  .
.
Solution.
La matrice principale du système a la forme  . Calculons son déterminant (si nécessaire, voir l'article) :
. Calculons son déterminant (si nécessaire, voir l'article) : 
Puisque le déterminant de la matrice principale du système est non nul, le système possède une solution unique qui peut être trouvée par la méthode de Cramer.
Composons et calculons les déterminants nécessaires ![]() (on obtient le déterminant en remplaçant la première colonne de la matrice A par une colonne de termes libres, le déterminant en remplaçant la deuxième colonne par une colonne de termes libres, et en remplaçant la troisième colonne de la matrice A par une colonne de termes libres) :
(on obtient le déterminant en remplaçant la première colonne de la matrice A par une colonne de termes libres, le déterminant en remplaçant la deuxième colonne par une colonne de termes libres, et en remplaçant la troisième colonne de la matrice A par une colonne de termes libres) : 
Trouver des variables inconnues à l'aide de formules  :
:
Répondre:
Le principal inconvénient de la méthode de Cramer (si on peut la qualifier d'inconvénient) est la complexité du calcul des déterminants lorsque le nombre d'équations dans le système est supérieur à trois.
Résolution de systèmes d'équations algébriques linéaires à l'aide de la méthode matricielle (en utilisant une matrice inverse).
Soit un système d'équations algébriques linéaires sous forme matricielle, où la matrice A a une dimension n par n et son déterminant est non nul.
Puisque , la matrice A est inversible, c’est-à-dire qu’il existe une matrice inverse. Si nous multiplions les deux côtés de l'égalité par la gauche, nous obtenons une formule pour trouver une matrice-colonne de variables inconnues. C'est ainsi que nous avons obtenu une solution d'un système d'équations algébriques linéaires en utilisant la méthode matricielle.
Exemple.
Résoudre un système d'équations linéaires méthode matricielle.
Solution.
Réécrivons le système d'équations sous forme matricielle : 
Parce que
alors le SLAE peut être résolu en utilisant la méthode matricielle. En utilisant la matrice inverse, la solution de ce système peut être trouvée comme  .
.
Construisons une matrice inverse à partir d'une matrice à partir d'additions algébriques d'éléments de la matrice A (si nécessaire, voir l'article) : 
Il reste à calculer la matrice des variables inconnues en multipliant la matrice inverse  à une matrice-colonne de membres libres (si nécessaire, voir l'article) :
à une matrice-colonne de membres libres (si nécessaire, voir l'article) : 
Répondre:
 ou dans une autre notation x 1 = 4, x 2 = 0, x 3 = -1.
ou dans une autre notation x 1 = 4, x 2 = 0, x 3 = -1.
Le principal problème lors de la recherche de solutions à des systèmes d'équations algébriques linéaires à l'aide de la méthode matricielle est la complexité de trouver la matrice inverse, en particulier pour les matrices carrées d'ordre supérieur au tiers.
Résolution de systèmes d'équations linéaires à l'aide de la méthode de Gauss.
Supposons que nous devions trouver une solution à un système de n équations linéaires avec n variables inconnues 
dont le déterminant de la matrice principale est différent de zéro.
L'essence de la méthode Gauss consiste en une exclusion séquentielle de variables inconnues : d'abord, x 1 est exclu de toutes les équations du système, à partir de la seconde, puis x 2 est exclu de toutes les équations, à partir de la troisième, et ainsi de suite, jusqu'à ce que seule la variable inconnue x n reste dans la dernière équation. Ce processus de transformation des équations du système pour éliminer séquentiellement les variables inconnues est appelé méthode gaussienne directe. Après avoir terminé le mouvement vers l'avant de la méthode gaussienne, x n est trouvé à partir de la dernière équation, en utilisant cette valeur de l'avant-dernière équation, x n-1 est calculé, et ainsi de suite, x 1 est trouvé à partir de la première équation. Le processus de calcul des variables inconnues lors du passage de la dernière équation du système à la première est appelé inverse de la méthode gaussienne.
Décrivons brièvement l'algorithme d'élimination des variables inconnues.
Nous supposerons cela, puisque nous pouvons toujours y parvenir en réorganisant les équations du système. Éliminons la variable inconnue x 1 de toutes les équations du système, en commençant par la seconde. Pour ce faire, à la deuxième équation du système on ajoute la première, multipliée par , à la troisième équation on ajoute la première, multipliée par , et ainsi de suite, à la nième équation on ajoute la première, multipliée par . Le système d'équations après de telles transformations prendra la forme 
où et  .
.
Nous serions arrivés au même résultat si nous avions exprimé x 1 en termes d'autres variables inconnues dans la première équation du système et substitué l'expression résultante dans toutes les autres équations. Ainsi, la variable x 1 est exclue de toutes les équations, à partir de la seconde.
Ensuite, nous procédons de la même manière, mais seulement avec une partie du système résultant, qui est marquée sur la figure 
Pour ce faire, à la troisième équation du système on ajoute la seconde, multipliée par , à la quatrième équation on ajoute la seconde, multipliée par , et ainsi de suite, à la nième équation on ajoute la seconde, multipliée par . Le système d'équations après de telles transformations prendra la forme 
où et  . Ainsi, la variable x 2 est exclue de toutes les équations, à partir de la troisième.
. Ainsi, la variable x 2 est exclue de toutes les équations, à partir de la troisième.
Ensuite, nous procédons à l'élimination de l'inconnu x 3, tandis que nous agissons de la même manière avec la partie du système marquée sur la figure 
On continue donc la progression directe de la méthode gaussienne jusqu'à ce que le système prenne la forme 
A partir de ce moment on commence l'inverse de la méthode gaussienne : on calcule x n à partir de la dernière équation comme , en utilisant la valeur obtenue de x n on trouve x n-1 à partir de l'avant-dernière équation, et ainsi de suite, on trouve x 1 à partir de la première équation .
Exemple.
Résoudre un système d'équations linéaires Méthode Gauss.
Solution.
Excluons la variable inconnue x 1 des deuxième et troisième équations du système. Pour ce faire, aux deux côtés des deuxième et troisième équations, nous ajoutons les parties correspondantes de la première équation, multipliées respectivement par et par : 
Maintenant, nous éliminons x 2 de la troisième équation en ajoutant à ses côtés gauche et droit les côtés gauche et droit de la deuxième équation, multipliés par : 
Ceci termine le mouvement vers l'avant de la méthode de Gauss ; nous commençons le mouvement vers l'arrière.
A partir de la dernière équation du système d'équations résultant, nous trouvons x 3 : 
De la deuxième équation, nous obtenons .
À partir de la première équation, nous trouvons la variable inconnue restante et complétons ainsi l'inverse de la méthode de Gauss.
Répondre:
X 1 = 4, x 2 = 0, x 3 = -1.
Résolution de systèmes d'équations algébriques linéaires de forme générale.
En général, le nombre d'équations du système p ne coïncide pas avec le nombre de variables inconnues n :
De tels SLAE peuvent n’avoir aucune solution, avoir une seule solution ou avoir une infinité de solutions. Cette affirmation s'applique également aux systèmes d'équations dont la matrice principale est carrée et singulière.
Théorème de Kronecker-Capelli.
Avant de trouver une solution à un système d’équations linéaires, il est nécessaire d’établir sa compatibilité. La réponse à la question de savoir quand SLAE est compatible et quand elle est incohérente est donnée par Théorème de Kronecker-Capelli:
Pour qu'un système de p équations à n inconnues (p peut être égal à n) soit cohérent, il faut et suffisant que le rang de la matrice principale du système soit égal au rang de la matrice étendue, c'est-à-dire , Rang(A)=Rang(T).
Considérons, à titre d'exemple, l'application du théorème de Kronecker-Capelli pour déterminer la compatibilité d'un système d'équations linéaires.
Exemple.
Découvrez si le système d'équations linéaires a  solutions.
solutions.
Solution.
 . Utilisons la méthode des mineurs limitrophes. Mineur du second ordre
. Utilisons la méthode des mineurs limitrophes. Mineur du second ordre  différent de zéro. Regardons les mineurs de troisième ordre qui le bordent :
différent de zéro. Regardons les mineurs de troisième ordre qui le bordent : 
Puisque tous les mineurs limitrophes du troisième ordre sont égaux à zéro, le rang de la matrice principale est égal à deux.
À son tour, le rang de la matrice étendue  est égal à trois, puisque le mineur est du troisième ordre
est égal à trois, puisque le mineur est du troisième ordre 
différent de zéro.
Ainsi, Rang(A), donc, en utilisant le théorème de Kronecker-Capelli, nous pouvons conclure que le système original d'équations linéaires est incohérent.
Répondre:
Le système n'a pas de solutions.
Nous avons donc appris à établir l'incohérence d'un système en utilisant le théorème de Kronecker-Capelli.
Mais comment trouver une solution à un SLAE si sa compatibilité est établie ?
Pour ce faire, nous avons besoin du concept de base mineure d’une matrice et d’un théorème sur le rang d’une matrice.
Le mineur d’ordre le plus élevé de la matrice A, différent de zéro, est appelé basique.
De la définition d'une base mineure il résulte que son ordre est égal au rang de la matrice. Pour une matrice A non nulle il peut y avoir plusieurs bases mineures ; il y a toujours une base mineure.
Par exemple, considérons la matrice  .
.
Tous les mineurs du troisième ordre de cette matrice sont égaux à zéro, puisque les éléments de la troisième ligne de cette matrice sont la somme des éléments correspondants des première et deuxième lignes.
Les mineurs de second ordre suivants sont basiques, car non nuls 
Mineurs  ne sont pas basiques, puisqu’ils sont égaux à zéro.
ne sont pas basiques, puisqu’ils sont égaux à zéro.
Théorème du rang matriciel.
Si le rang d'une matrice d'ordre p par n est égal à r, alors tous les éléments de ligne (et de colonne) de la matrice qui ne forment pas la base mineure choisie sont exprimés linéairement en termes d'éléments de ligne (et de colonne) correspondants formant la base mineure.
Que nous dit le théorème du rang matriciel ?
Si, selon le théorème de Kronecker-Capelli, nous avons établi la compatibilité du système, alors nous choisissons n'importe quelle base mineure de la matrice principale du système (son ordre est égal à r), et excluons du système toutes les équations qui font ne constitue pas la base mineure sélectionnée. Le SLAE ainsi obtenu sera équivalent à l'original, puisque les équations rejetées sont toujours redondantes (selon le théorème du rang matriciel, elles sont une combinaison linéaire des équations restantes).
En conséquence, après avoir écarté les équations inutiles du système, deux cas sont possibles.
Si le nombre d'équations r dans le système résultant est égal au nombre de variables inconnues, alors il sera définitif et la seule solution pourra être trouvée par la méthode de Cramer, la méthode matricielle ou la méthode de Gauss.
Exemple.
 .
.
Solution.
Rang de la matrice principale du système  est égal à deux, puisque le mineur est du second ordre
est égal à deux, puisque le mineur est du second ordre  différent de zéro. Rang matriciel étendu
différent de zéro. Rang matriciel étendu  est également égal à deux, puisque le seul mineur du troisième ordre est zéro
est également égal à deux, puisque le seul mineur du troisième ordre est zéro 
et le mineur du second ordre considéré ci-dessus est différent de zéro. Sur la base du théorème de Kronecker-Capelli, nous pouvons affirmer la compatibilité du système original d'équations linéaires, puisque Rang(A)=Rang(T)=2.
Comme base mineure nous prenons . Il est formé des coefficients des première et deuxième équations : 
La troisième équation du système ne participe pas à la formation de la base mineure, on l'exclut donc du système basé sur le théorème sur le rang de la matrice : 
C'est ainsi que nous avons obtenu un système élémentaire d'équations algébriques linéaires. Résolvons-le en utilisant la méthode de Cramer : 
Répondre:
x1 = 1, x2 = 2.
Si le nombre d'équations r dans le SLAE résultant est inférieur au nombre de variables inconnues n, alors sur les côtés gauches des équations, nous laissons les termes qui forment la base mineure et nous transférons les termes restants vers les côtés droits du équations du système de signe opposé.
Les variables inconnues (r d'entre elles) restant sur les côtés gauches des équations sont appelées principal.
Les variables inconnues (il y a n - r pièces) qui se trouvent sur les côtés droits sont appelées gratuit.
Nous pensons maintenant que les variables inconnues libres peuvent prendre des valeurs arbitraires, tandis que les r variables inconnues principales seront exprimées à travers des variables inconnues libres d'une manière unique. Leur expression peut être trouvée en résolvant le SLAE résultant en utilisant la méthode de Cramer, la méthode matricielle ou la méthode de Gauss.
Regardons cela avec un exemple.
Exemple.
Résoudre un système d'équations algébriques linéaires  .
.
Solution.
Trouvons le rang de la matrice principale du système  par la méthode des mineurs limitrophes. Prenons un 1 1 = 1 comme mineur non nul du premier ordre. Commençons par rechercher un mineur non nul du second ordre limitrophe de ce mineur :
par la méthode des mineurs limitrophes. Prenons un 1 1 = 1 comme mineur non nul du premier ordre. Commençons par rechercher un mineur non nul du second ordre limitrophe de ce mineur : 
C’est ainsi que nous avons trouvé un mineur non nul du second ordre. Commençons par rechercher un mineur non nul du troisième ordre : 
Ainsi, le rang de la matrice principale est de trois. Le rang de la matrice étendue est également égal à trois, c'est-à-dire que le système est cohérent.
Nous prenons comme base le mineur non nul trouvé du troisième ordre.
Pour plus de clarté, nous montrons les éléments qui constituent la base mineure : 
Nous laissons les termes impliqués dans la base mineure du côté gauche des équations du système, et transférons le reste avec des signes opposés vers les côtés droits : 
Donnons aux variables inconnues libres x 2 et x 5 des valeurs arbitraires, c'est-à-dire que nous acceptons ![]() , où sont des nombres arbitraires. Dans ce cas, le SLAE prendra la forme
, où sont des nombres arbitraires. Dans ce cas, le SLAE prendra la forme 
Résolvons le système élémentaire d’équations algébriques linéaires résultant en utilisant la méthode de Cramer : 
Ainsi, .
Dans votre réponse, n'oubliez pas d'indiquer les variables inconnues libres.
Répondre:
Où sont les nombres arbitraires.
Résumer.
Pour résoudre un système d’équations algébriques linéaires générales, nous déterminons d’abord sa compatibilité à l’aide du théorème de Kronecker – Capelli. Si le rang de la matrice principale n'est pas égal au rang de la matrice étendue, alors on conclut que le système est incompatible.
Si le rang de la matrice principale est égal au rang de la matrice étendue, alors on sélectionne une base mineure et écarte les équations du système qui ne participent pas à la formation de la base mineure sélectionnée.
Si l'ordre de la base mineure est égal au nombre de variables inconnues, alors le SLAE a une solution unique, qui peut être trouvée par n'importe quelle méthode que nous connaissons.
Si l'ordre de la base mineure est inférieur au nombre de variables inconnues, alors sur le côté gauche des équations du système, nous laissons les termes avec les principales variables inconnues, transférons les termes restants vers la droite et donnons des valeurs arbitraires à les variables inconnues libres. A partir du système d'équations linéaires résultant, nous trouvons les principales inconnues en utilisant la méthode de Cramer, la méthode matricielle ou la méthode de Gauss.
Méthode de Gauss pour résoudre des systèmes d'équations algébriques linéaires de forme générale.
La méthode de Gauss peut être utilisée pour résoudre des systèmes d’équations algébriques linéaires de toute nature sans tester au préalable leur cohérence. Le processus d'élimination séquentielle des variables inconnues permet de conclure à la fois sur la compatibilité et l'incompatibilité du SLAE, et si une solution existe, il permet de la trouver.
D'un point de vue informatique, la méthode gaussienne est préférable.
Voir sa description détaillée et ses exemples analysés dans l'article Méthode de Gauss pour résoudre des systèmes d'équations algébriques linéaires générales.
Écrire une solution générale à des systèmes algébriques linéaires homogènes et inhomogènes en utilisant les vecteurs du système fondamental de solutions.
Dans cette section, nous parlerons de systèmes simultanés homogènes et inhomogènes d'équations algébriques linéaires qui ont un nombre infini de solutions.
Traitons d'abord des systèmes homogènes.
Système fondamental de solutions un système homogène de p équations algébriques linéaires avec n variables inconnues est un ensemble de (n – r) solutions linéairement indépendantes de ce système, où r est l'ordre de la base mineure de la matrice principale du système.
Si nous désignons les solutions linéairement indépendantes d'un SLAE homogène comme X (1) , X (2) , …, X (n-r) (X (1) , X (2) , …, X (n-r) sont des matrices en colonnes de dimension n par 1) , alors la solution générale de ce système homogène est représentée comme une combinaison linéaire de vecteurs du système fondamental de solutions avec des coefficients constants arbitraires C 1, C 2, ..., C (n-r), c'est-à-dire .
Que signifie le terme solution générale d'un système homogène d'équations algébriques linéaires (oroslau) ?
Le sens est simple : la formule spécifie toutes les solutions possibles du SLAE original, c'est-à-dire en prenant n'importe quel ensemble de valeurs de constantes arbitraires C 1, C 2, ..., C (n-r), en utilisant la formule que nous allons obtenir une des solutions du SLAE homogène original.
Ainsi, si nous trouvons un système fondamental de solutions, alors nous pouvons définir toutes les solutions de ce SLAE homogène comme .
Montrons le processus de construction d'un système fondamental de solutions à un SLAE homogène.
Nous sélectionnons la base mineure du système original d'équations linéaires, excluons toutes les autres équations du système et transférons tous les termes contenant des variables inconnues libres vers les membres droits des équations du système de signes opposés. Donnons aux variables inconnues libres les valeurs 1,0,0,...,0 et calculons les principales inconnues en résolvant le système élémentaire d'équations linéaires résultant de n'importe quelle manière, par exemple en utilisant la méthode Cramer. Cela donnera X (1) - la première solution du système fondamental. Si nous donnons aux inconnues libres les valeurs 0,1,0,0,…,0 et calculons les principales inconnues, nous obtenons X (2) . Et ainsi de suite. Si nous attribuons les valeurs 0,0,…,0,1 aux variables inconnues libres et calculons les principales inconnues, nous obtenons X (n-r) . De cette manière, un système fondamental de solutions à un SLAE homogène sera construit et sa solution générale pourra s'écrire sous la forme .
Pour les systèmes inhomogènes d'équations algébriques linéaires, la solution générale est représentée sous la forme , où est la solution générale du système homogène correspondant, et est la solution particulière du SLAE inhomogène original, que nous obtenons en donnant aux inconnues libres les valeurs 0,0,...,0 et calcul des valeurs des principales inconnues.
Regardons des exemples.
Exemple.
Trouver le système fondamental de solutions et la solution générale d'un système homogène d'équations algébriques linéaires  .
.
Solution.
Le rang de la matrice principale des systèmes homogènes d'équations linéaires est toujours égal au rang de la matrice étendue. Trouvons le rang de la matrice principale en utilisant la méthode des mineurs limitrophes. Comme mineur non nul du premier ordre, on prend l'élément a 1 1 = 9 de la matrice principale du système. Trouvons le mineur limite non nul du deuxième ordre : 
Un mineur du second ordre, différent de zéro, a été retrouvé. Parcourons les mineurs du troisième ordre qui le bordent à la recherche d'un non nul : 
Tous les mineurs limitrophes du troisième ordre sont égaux à zéro, donc le rang de la matrice principale et étendue est égal à deux. Prenons . Pour plus de clarté, notons les éléments du système qui le composent : 
La troisième équation du SLAE original ne participe pas à la formation de la base mineure, elle peut donc être exclue : 
On laisse les termes contenant les principales inconnues du côté droit des équations, et on transfère les termes à inconnues libres du côté droit :
Construisons un système fondamental de solutions au système homogène original d'équations linéaires. Le système fondamental de solutions de ce SLAE consiste en deux solutions, puisque le SLAE original contient quatre variables inconnues, et l'ordre de sa base mineure est égal à deux. Pour trouver X (1), on donne aux inconnues libres les valeurs x 2 = 1, x 4 = 0, puis on trouve les principales inconnues du système d'équations  .
.
La méthode gaussienne, également appelée méthode d'élimination séquentielle des inconnues, est la suivante. A l'aide de transformations élémentaires, un système d'équations linéaires est amené sous une forme telle que sa matrice de coefficients s'avère être trapézoïdal (identique à triangulaire ou à gradins) ou proche du trapèze (trait direct de la méthode gaussienne, ci-après - simplement trait droit). Un exemple d'un tel système et de sa solution se trouve dans la figure ci-dessus.
Dans un tel système, la dernière équation ne contient qu’une seule variable et sa valeur peut être trouvée sans ambiguïté. La valeur de cette variable est ensuite substituée dans l'équation précédente ( inverse de la méthode gaussienne , puis juste l'inverse), à partir de laquelle la variable précédente est trouvée, et ainsi de suite.
Dans un système trapézoïdal (triangulaire), comme on le voit, la troisième équation ne contient plus de variables oui Et X, et la deuxième équation est la variable X .
Une fois que la matrice du système a pris une forme trapézoïdale, il n'est plus difficile de comprendre la question de compatibilité du système, de déterminer le nombre de solutions et de trouver les solutions elles-mêmes.
Avantages de la méthode :
- lors de la résolution de systèmes d'équations linéaires avec plus de trois équations et inconnues, la méthode de Gauss n'est pas aussi lourde que la méthode de Cramer, car la résolution avec la méthode de Gauss nécessite moins de calculs ;
- la méthode de Gauss peut résoudre des systèmes indéterminés d'équations linéaires, c'est-à-dire avoir une solution générale (et nous les analyserons dans cette leçon), et en utilisant la méthode de Cramer, nous pouvons seulement affirmer que le système est indéterminé ;
- vous pouvez résoudre des systèmes d'équations linéaires dans lesquels le nombre d'inconnues n'est pas égal au nombre d'équations (nous les analyserons également dans cette leçon) ;
- La méthode est basée sur des méthodes élémentaires (scolaires) - la méthode de substitution d'inconnues et la méthode d'addition d'équations, que nous avons évoquées dans l'article correspondant.
Afin que chacun comprenne la simplicité avec laquelle les systèmes trapézoïdaux (triangulaires, en escalier) d'équations linéaires sont résolus, nous présentons une solution à un tel système utilisant le mouvement inverse. Une solution rapide à ce système a été présentée dans l'image au début de la leçon.
Exemple 1. Résolvez un système d'équations linéaires en utilisant l'inverse :

Solution. Dans ce système trapézoïdal la variable z peut être trouvé uniquement à partir de la troisième équation. Nous substituons sa valeur dans la deuxième équation et obtenons la valeur de la variable oui:
Nous connaissons maintenant les valeurs de deux variables - z Et oui. Nous les substituons dans la première équation et obtenons la valeur de la variable X:
À partir des étapes précédentes, nous écrivons la solution du système d’équations :
![]()
Pour obtenir un tel système trapézoïdal d'équations linéaires, que nous avons résolu très simplement, il faut utiliser un trait vers l'avant associé à des transformations élémentaires du système d'équations linéaires. Ce n'est pas non plus très difficile.
Transformations élémentaires d'un système d'équations linéaires
En répétant la méthode scolaire consistant à additionner algébriquement les équations d'un système, nous avons découvert qu'à l'une des équations du système, nous pouvons ajouter une autre équation du système et que chacune des équations peut être multipliée par certains nombres. On obtient ainsi un système d’équations linéaires équivalent à celui-ci. Dans celui-ci, une équation ne contenait déjà qu'une seule variable, dont la valeur est remplacée par d'autres équations et nous arrivons à une solution. Une telle addition est un des types de transformation élémentaire du système. Lors de l'utilisation de la méthode gaussienne, nous pouvons utiliser plusieurs types de transformations.

L'animation ci-dessus montre comment le système d'équations se transforme progressivement en un système trapézoïdal. C'est-à-dire celui que vous avez vu dans la toute première animation et vous êtes convaincu qu'il est facile d'y trouver les valeurs de toutes les inconnues. Comment effectuer une telle transformation et, bien sûr, des exemples seront discutés plus en détail.
Lors de la résolution de systèmes d'équations linéaires avec un nombre quelconque d'équations et d'inconnues dans le système d'équations et dans la matrice étendue du système Peut:
- réorganiser les lignes (cela a été mentionné au tout début de cet article) ;
- si d'autres transformations aboutissent à des lignes égales ou proportionnelles, elles peuvent être supprimées, sauf une ;
- supprimer les lignes « zéro » où tous les coefficients sont égaux à zéro ;
- multiplier ou diviser n'importe quelle chaîne par un certain nombre ;
- à n’importe quelle ligne, ajoutez une autre ligne, multipliée par un certain nombre.
Grâce aux transformations, nous obtenons un système d'équations linéaires équivalent à celui-ci.
Algorithme et exemples de résolution d'un système d'équations linéaires avec une matrice carrée du système à l'aide de la méthode de Gauss
Considérons d'abord la résolution de systèmes d'équations linéaires dans lesquels le nombre d'inconnues est égal au nombre d'équations. La matrice d'un tel système est carrée, c'est-à-dire que le nombre de lignes est égal au nombre de colonnes.
Exemple 2. Résoudre un système d'équations linéaires en utilisant la méthode de Gauss
Lors de la résolution de systèmes d'équations linéaires à l'aide de méthodes scolaires, nous avons multiplié l'une des équations terme par terme, de sorte que les coefficients de la première variable des deux équations soient des nombres opposés. Lors de l'ajout d'équations, cette variable est éliminée. La méthode Gauss fonctionne de la même manière.
Pour simplifier l'apparence de la solution créons une matrice étendue du système:

Dans cette matrice, les coefficients des inconnues sont situés à gauche avant la ligne verticale, et les termes libres sont situés à droite après la ligne verticale.
Pour faciliter la division des coefficients des variables (pour obtenir la division par unité) Échangeons les première et deuxième lignes de la matrice système. On obtient un système équivalent à celui-ci, puisque dans un système d'équations linéaires les équations peuvent être interverties :
Utiliser la nouvelle première équation éliminer la variable X de la deuxième et de toutes les équations suivantes. Pour ce faire, à la deuxième ligne de la matrice, nous ajoutons la première ligne, multipliée par (dans notre cas, par ), à la troisième ligne - la première ligne, multipliée par (dans notre cas, par ).
Ceci est possible parce que
S'il y avait plus de trois équations dans notre système, nous devrions alors ajouter à toutes les équations suivantes la première ligne, multipliée par le rapport des coefficients correspondants, pris avec un signe moins.
En conséquence, nous obtenons une matrice équivalente à ce système d'un nouveau système d'équations, dans lequel toutes les équations, à partir de la seconde ne contient pas de variable X :
Pour simplifier la deuxième ligne du système résultant, multipliez-la par et obtenez à nouveau la matrice d'un système d'équations équivalent à ce système :

Maintenant, en gardant inchangée la première équation du système résultant, en utilisant la deuxième équation, nous éliminons la variable oui de toutes les équations suivantes. Pour ce faire, à la troisième ligne de la matrice système, nous ajoutons la deuxième ligne, multipliée par (dans notre cas par ).
S'il y avait plus de trois équations dans notre système, nous devions alors ajouter une deuxième ligne à toutes les équations suivantes, multipliée par le rapport des coefficients correspondants pris avec un signe moins.
En conséquence, on obtient à nouveau la matrice d'un système équivalent à ce système d'équations linéaires :
Nous avons obtenu un système trapézoïdal équivalent d'équations linéaires :

Si le nombre d'équations et de variables est supérieur à celui de notre exemple, le processus d'élimination séquentielle des variables se poursuit jusqu'à ce que la matrice du système devienne trapézoïdale, comme dans notre exemple de démonstration.
Nous trouverons la solution « dès la fin » - le mouvement inverse. Pour ça à partir de la dernière équation, nous déterminons z:
.
En substituant cette valeur dans l'équation précédente, nous trouverons oui:
De la première équation nous trouverons X:
![]()
Réponse : la solution de ce système d'équations est ![]() .
.
: dans ce cas la même réponse sera donnée si le système a une solution unique. Si le système a un nombre infini de solutions, alors telle sera la réponse, et c'est le sujet de la cinquième partie de cette leçon.
Résolvez vous-même un système d'équations linéaires en utilisant la méthode gaussienne, puis examinez la solution
Ici encore, nous avons un exemple d'un système cohérent et défini d'équations linéaires, dans lequel le nombre d'équations est égal au nombre d'inconnues. La différence entre notre exemple de démonstration et l'algorithme est qu'il existe déjà quatre équations et quatre inconnues.
Exemple 4. Résolvez un système d'équations linéaires en utilisant la méthode de Gauss :

Vous devez maintenant utiliser la deuxième équation pour éliminer la variable des équations suivantes. Réalisons les travaux préparatoires. Pour rendre le rapport des coefficients plus pratique, vous devez en obtenir un dans la deuxième colonne de la deuxième ligne. Pour ce faire, soustrayez le troisième de la deuxième ligne et multipliez la deuxième ligne obtenue par -1.

Procédons maintenant à l'élimination proprement dite de la variable des troisième et quatrième équations. Pour ce faire, ajoutez la deuxième ligne multipliée par , à la troisième ligne, et la deuxième ligne multipliée par , à la quatrième ligne.

Maintenant, en utilisant la troisième équation, nous éliminons la variable de la quatrième équation. Pour ce faire, ajoutez la troisième ligne à la quatrième ligne, multipliée par . Nous obtenons une matrice trapézoïdale étendue.

Nous avons obtenu un système d'équations auquel le système donné est équivalent :

Par conséquent, les systèmes résultants et donnés sont compatibles et définis. Nous trouvons la solution finale « dès la fin ». A partir de la quatrième équation, nous pouvons exprimer directement la valeur de la variable « x-quatre » :
Nous substituons cette valeur dans la troisième équation du système et obtenons
![]() ,
,
![]() ,
,
Enfin, la substitution de valeur
La première équation donne
![]() ,
,
où trouve-t-on « x en premier » :
Réponse : ce système d'équations a une solution unique ![]() .
.
Vous pouvez également vérifier la solution du système sur une calculatrice en utilisant la méthode de Cramer : dans ce cas, la même réponse sera donnée si le système a une solution unique.
Résolution de problèmes appliqués par la méthode de Gauss à partir de l'exemple d'un problème sur les alliages
Des systèmes d'équations linéaires sont utilisés pour modéliser des objets réels dans le monde physique. Résolvons l'un de ces problèmes : les alliages. Des problèmes similaires concernent les mélanges, le coût ou la part de biens individuels dans un groupe de biens, etc.
Exemple 5. Trois pièces d'alliage ont une masse totale de 150 kg. Le premier alliage contient 60 % de cuivre, le deuxième - 30 %, le troisième - 10 %. De plus, dans les deuxième et troisième alliages pris ensemble, il y a 28,4 kg de cuivre de moins que dans le premier alliage, et dans le troisième alliage, il y a 6,2 kg de cuivre de moins que dans le deuxième. Trouvez la masse de chaque morceau de l’alliage.
Solution. Nous composons un système d'équations linéaires :
On multiplie les deuxième et troisième équations par 10, on obtient un système équivalent d'équations linéaires :
Nous créons une matrice étendue du système :
Attention, tout droit. En ajoutant (dans notre cas, en soustrayant) une ligne multipliée par un nombre (nous l'appliquons deux fois), les transformations suivantes se produisent avec la matrice étendue du système :

Le déménagement direct est terminé. Nous avons obtenu une matrice trapézoïdale expansée.
Nous appliquons le mouvement inverse. Nous trouvons la solution dès la fin. On voit ça.
De la deuxième équation on trouve
De la troisième équation -
Vous pouvez également vérifier la solution du système sur une calculatrice en utilisant la méthode de Cramer : dans ce cas, la même réponse sera donnée si le système a une solution unique.
La simplicité de la méthode de Gauss est attestée par le fait qu'il n'a fallu que 15 minutes au mathématicien allemand Carl Friedrich Gauss pour l'inventer. En plus de la méthode qui porte son nom, le dicton « Nous ne devons pas confondre ce qui nous semble incroyable et contre nature avec ce qui est absolument impossible » est connu des œuvres de Gauss - une sorte de brève instruction sur la façon de faire des découvertes.
Dans de nombreux problèmes appliqués, il peut ne pas y avoir de troisième contrainte, c'est-à-dire une troisième équation, il faut alors résoudre un système de deux équations à trois inconnues en utilisant la méthode gaussienne, ou, à l'inverse, il y a moins d'inconnues que d'équations. Nous allons maintenant commencer à résoudre de tels systèmes d'équations.
En utilisant la méthode gaussienne, vous pouvez déterminer si un système est compatible ou incompatible néquations linéaires avec n variables.
La méthode de Gauss et les systèmes d'équations linéaires avec un nombre infini de solutions
L’exemple suivant est un système cohérent mais indéterminé d’équations linéaires, c’est-à-dire ayant un nombre infini de solutions.
Après avoir effectué des transformations dans la matrice étendue du système (réorganisation des lignes, multiplication et division des lignes par un certain nombre, ajout d'un autre à une ligne), des lignes du formulaire pourraient apparaître
Si dans toutes les équations ayant la forme
Les termes libres sont égaux à zéro, cela signifie que le système est indéfini, c'est-à-dire qu'il a un nombre infini de solutions, et les équations de ce type sont « superflues » et nous les excluons du système.
Exemple 6.

Solution. Créons une matrice étendue du système. Ensuite, en utilisant la première équation, nous éliminons la variable des équations suivantes. Pour cela, ajoutez aux deuxième, troisième et quatrième lignes la première, multipliée par :

Ajoutons maintenant la deuxième ligne aux troisième et quatrième.
On arrive alors au système

Les deux dernières équations se sont transformées en équations de la forme. Ces équations sont satisfaites pour toute valeur des inconnues et peuvent être écartées.
Pour satisfaire la deuxième équation, on peut choisir des valeurs arbitraires pour et , alors la valeur pour sera déterminée de manière unique : ![]() . À partir de la première équation, la valeur de se trouve également de manière unique :
. À partir de la première équation, la valeur de se trouve également de manière unique : ![]() .
.
Le système donné et le dernier sont cohérents, mais incertains, et les formules

pour arbitraire et donnez-nous toutes les solutions d’un système donné.
Méthode de Gauss et systèmes d'équations linéaires sans solutions
L’exemple suivant est un système d’équations linéaires incohérent, c’est-à-dire qui n’a pas de solution. La réponse à de tels problèmes se formule ainsi : le système n’a pas de solutions.
Comme déjà mentionné à propos du premier exemple, après avoir effectué des transformations, des lignes du formulaire pourraient apparaître dans la matrice étendue du système
correspondant à une équation de la forme
Si parmi elles il y a au moins une équation avec un terme libre non nul (c'est-à-dire ), alors ce système d'équations est incohérent, c'est-à-dire qu'il n'a pas de solutions et sa solution est complète.
Exemple 7. Résolvez le système d'équations linéaires en utilisant la méthode de Gauss :
Solution. Nous composons une matrice étendue du système. En utilisant la première équation, nous excluons la variable des équations suivantes. Pour ce faire, ajoutez la première ligne multipliée par à la deuxième ligne, la première ligne multipliée par la troisième ligne et la première ligne multipliée par la quatrième ligne.

Vous devez maintenant utiliser la deuxième équation pour éliminer la variable des équations suivantes. Pour obtenir des rapports entiers de coefficients, nous échangeons les deuxième et troisième lignes de la matrice étendue du système.

Pour exclure les troisième et quatrième équations, ajoutez la deuxième multipliée par , à la troisième ligne, et la seconde multipliée par , à la quatrième ligne.

Maintenant, en utilisant la troisième équation, nous éliminons la variable de la quatrième équation. Pour ce faire, ajoutez la troisième ligne à la quatrième ligne, multipliée par .

Le système donné est donc équivalent au suivant :
Le système résultant est incohérent, puisque sa dernière équation ne peut être satisfaite par aucune valeur des inconnues. Ce système n’a donc aucune solution.


















. Ce que Yuli Kim chante au son de l'hymne")





